Band matrix
In mathematics, particularly matrix theory, a band matrix is a sparse matrix whose non-zero entries are confined to a diagonal band, comprising the main diagonal and zero or more diagonals on either side.
Contents |
Matrix bandwidth
Formally, consider an n×n matrix A=(ai,j ). If all matrix elements are zero outside a diagonally bordered band whose range is determined by constants k1 and k2:

then the quantities k1 and k2 are called the left and right half-bandwidth, respectively (Golub & Van Loan 1996, §1.2.1). The bandwidth of the matrix is k1 + k2 + 1 (in other words, it is the smallest number of adjacent diagonals to which the non-zero elements are confined).
A matrix is called a band matrix or banded matrix if its bandwidth is reasonably small.
A band matrix with k1 = k2 = 0 is a diagonal matrix; a band matrix with k1 = k2 = 1 is a tridiagonal matrix; when k1 = k2 = 2 one has a pentadiagonal matrix and so on. If one puts k1 = 0, k2 = n−1, one obtains the definition of an upper triangular matrix; similarly, for k1 = n−1, k2 = 0 one obtains a lower triangular matrix.
Applications
In numerical analysis, matrices from finite element or finite difference problems are often banded. Such matrices can be viewed as descriptions of the coupling between the problem variables; the bandedness corresponds to the fact that variables are not coupled over arbitrarily large distances. Such matrices can be further divided - for instance, banded matrices exist where every element in the band is nonzero. These often arise when discretising one-dimensional problems.
Problems in higher dimensions also lead to banded matrices, in which case the band itself also tends to be sparse. For instance, a partial differential equation on a square domain (using central differences) will yield a matrix with a half-bandwidth equal to the square root of the matrix dimension, but inside the band only 5 diagonals are nonzero. Unfortunately, applying Gaussian elimination (or equivalently an LU decomposition) to such a matrix results in the band being filled in by many non-zero elements.
Band storage
Band matrices are usually stored by storing the diagonals in the band; the rest is implicitly zero.
For example, a tridiagonal matrix has bandwidth 3. The 6-by-6 matrix
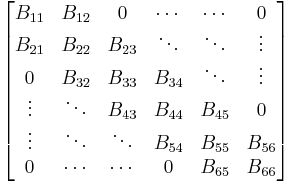
is stored as the 6-by-3 matrix
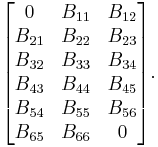
A further saving is possible when the matrix is symmetric. For example, consider a symmetric 6-by-6 matrix with a right bandwidth of 2:
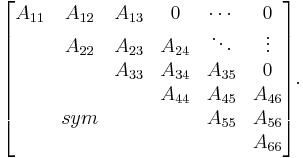
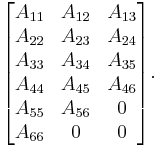
This matrix is stored as the 6-by-3 matrix:
Band form of sparse matrices
From a computational point of view, working with band matrices is always preferential to working with similarly dimensioned square matrices. A band matrix can be likened in complexity to a rectangular matrix whose row dimension is equal to the bandwidth of the band matrix. Thus the work involved in performing operations such as multiplication falls significantly, often leading to huge savings in terms of calculation time and complexity.
As sparse matrices lend themselves to more efficient computation than dense matrices, as well as in more efficient utilization of computer storage, there has been much research focused on finding ways to minimise the bandwidth (or directly minimise the fill in) by applying permutations to the matrix, or other such equivalence or similarity transformations.
The Cuthill–McKee algorithm can be used to reduce the bandwidth of a sparse symmetric matrix. There are, however, matrices for which the reverse Cuthill–McKee algorithm performs better. There are many other methods in use.
The problem of finding a representation of a matrix with minimal bandwidth by means of permutations of rows and columns is NP-hard.[1]
Examples and special cases
The following are special cases of band matrices:
- Diagonal matrices.
- Tridiagonal matrices.
- Pentadiagonal matrices.
- Upper and lower triangular matrices.
- Upper and lower Hessenberg matrices.
- Block-diagonal matrices.
- Shift matrices and shear matrices.
- Matrices in Jordan normal form.
- A skyline matrix, also called "variable band matrix" is a generalization of band matrix
The inverses of Lehmer matrices are constant tridiagonal matrices, and are thus band matrices.
See also
References
- ^ "Coping with the NP-Hardness of the Graph Bandwidth Problem", Uriel Feige, Lecture Notes in Computer Science, Volume 1851, 2000, pp. 129-145, doi:10.1007/3-540-44985-X_2
- Golub, Gene H.; Van Loan, Charles F. (1996). Matrix Computations (3rd ed.). Baltimore: Johns Hopkins. ISBN 978-0-8018-5414-9..
- Press, WH; Teukolsky, SA; Vetterling, WT; Flannery, BP (2007), "Section 2.4", Numerical Recipes: The Art of Scientific Computing (3rd ed.), New York: Cambridge University Press, ISBN 978-0-521-88068-8, http://apps.nrbook.com/empanel/index.html?pg=56